@inproceedings{2021-towards-part-based,
author = {Bokhovkin, Alexey and Ishimtsev, Vladislav and Bogomolov, Emil and Zorin, Denis and Artemov, Alexey and Burnaev, Evgeny and Dai, Angela},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
pages = {7484-7494},
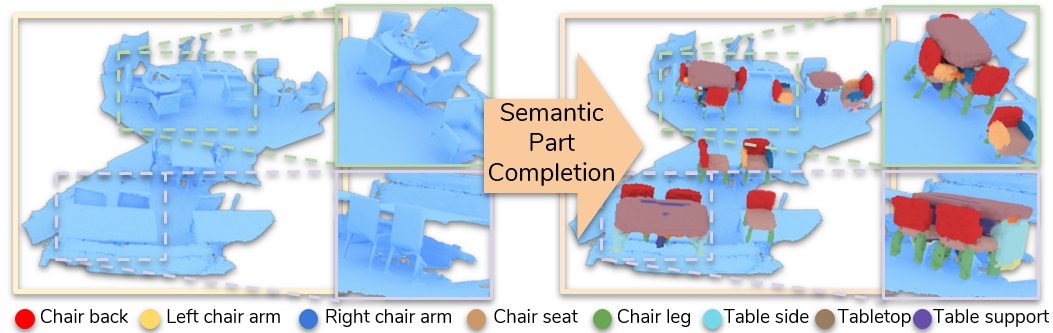
title = {Towards Part-Based Understanding of RGB-D Scans},
year = {2021}
}